¿Qué es una serie de tiempo?
Una serie de tiempo es una secuencia de observaciones indexadas por el tiempo. A diferencia de los datos de corte transversal, las observaciones consecutivas en una serie de tiempo suelen estar correlacionadas: el valor de hoy depende del de ayer. Esta estructura de dependencia es lo que hace que las series de tiempo sean a la vez más informativas y más difíciles de analizar que los datos independientes.
Definición
Una serie de tiempo es un conjunto de observaciones \(\{y_t\}\) donde \(t\) indexa el tiempo: \(t = 1, 2, \ldots, T\). Las observaciones pueden registrarse a cualquier frecuencia regular: anual, trimestral, mensual, semanal, diaria o intradía.
Ejemplos en distintos ámbitos:
- Economía: PIB mensual, inflación trimestral, precios de acciones diarios.
- Meteorología: temperatura diaria, velocidad del viento horaria, precipitación anual.
- Negocio: ventas semanales, tráfico web mensual, consumo energético diario.
- Medicina: frecuencia cardíaca a lo largo del tiempo, ingresos diarios de pacientes, incidencia semanal de enfermedades.
El reto fundamental es que las observaciones no son independientes. Los métodos estadísticos estándar (regresión, contrastes de hipótesis, intervalos de confianza) asumen datos i.i.d. Aplicarlos directamente a series de tiempo produce errores estándar incorrectos e inferencias engañosas.
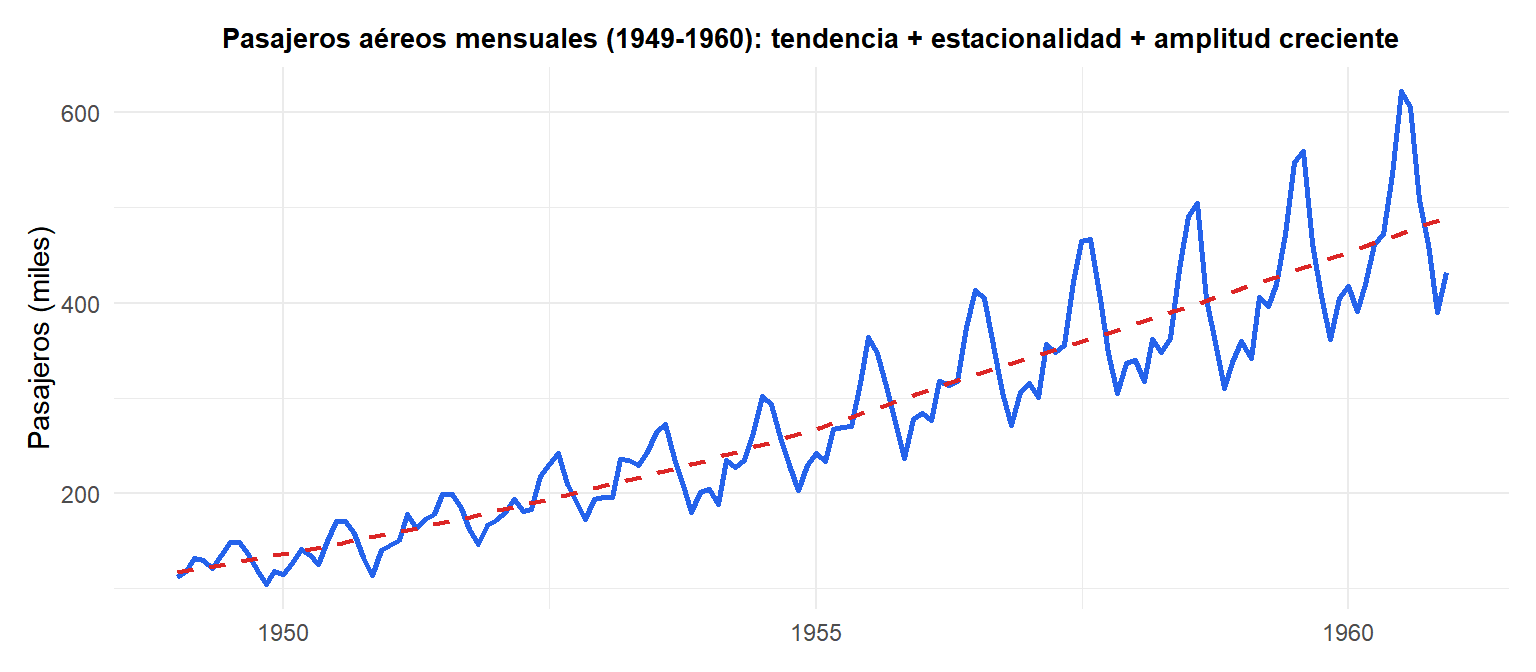
La serie de pasajeros aéreos muestra tres características simultáneamente: una tendencia ascendente (línea roja discontinua), un patrón estacional claro (picos en verano) y una amplitud creciente (las oscilaciones estacionales aumentan con el nivel). Estas tres características definen los componentes principales de una serie de tiempo.
Componentes de una serie de tiempo
Cualquier serie de tiempo puede entenderse como la combinación de cuatro componentes:
- Tendencia (\(T_t\))
La dirección a largo plazo de la serie: ascendente, descendente o plana. Refleja fuerzas de evolución lenta: crecimiento demográfico, cambio tecnológico, ciclos económicos a largo plazo. La tendencia suele ser suave y persistente.
- Estacionalidad (\(S_t\))
Patrones regulares y repetitivos a una frecuencia fija y conocida: diaria (más tráfico en horas punta), semanal (menos ingresos hospitalarios los fines de semana), mensual (más ventas minoristas en diciembre), trimestral. La estacionalidad tiene un periodo fijo y es predecible.
- Ciclo (\(C_t\))
Oscilaciones a largo plazo sin periodo fijo: ciclos económicos de varios años, ciclos de precios de materias primas. A diferencia de la estacionalidad, los ciclos son irregulares en frecuencia y amplitud y más difíciles de predecir.
- Componente irregular / ruido (\(\varepsilon_t\))
La variación residual que no puede atribuirse a la tendencia, la estacionalidad ni el ciclo. Idealmente es ruido blanco: media cero, varianza constante, sin autocorrelación.
Descomposición aditiva vs multiplicativa
Los cuatro componentes se combinan de forma aditiva o multiplicativa:
\[y_t = T_t + S_t + C_t + \varepsilon_t \quad \text{(aditiva)}\]
\[y_t = T_t \times S_t \times C_t \times \varepsilon_t \quad \text{(multiplicativa)}\]
Aditiva: las fluctuaciones estacionales son constantes en términos absolutos independientemente del nivel. Se usa cuando la amplitud de las oscilaciones estacionales no varía con el tiempo.
Multiplicativa: las fluctuaciones estacionales crecen proporcionalmente con el nivel. Se usa cuando la amplitud aumenta a medida que crece la serie (como en los datos de pasajeros aéreos). Equivale a aplicar un modelo aditivo a \(\log(y_t)\).
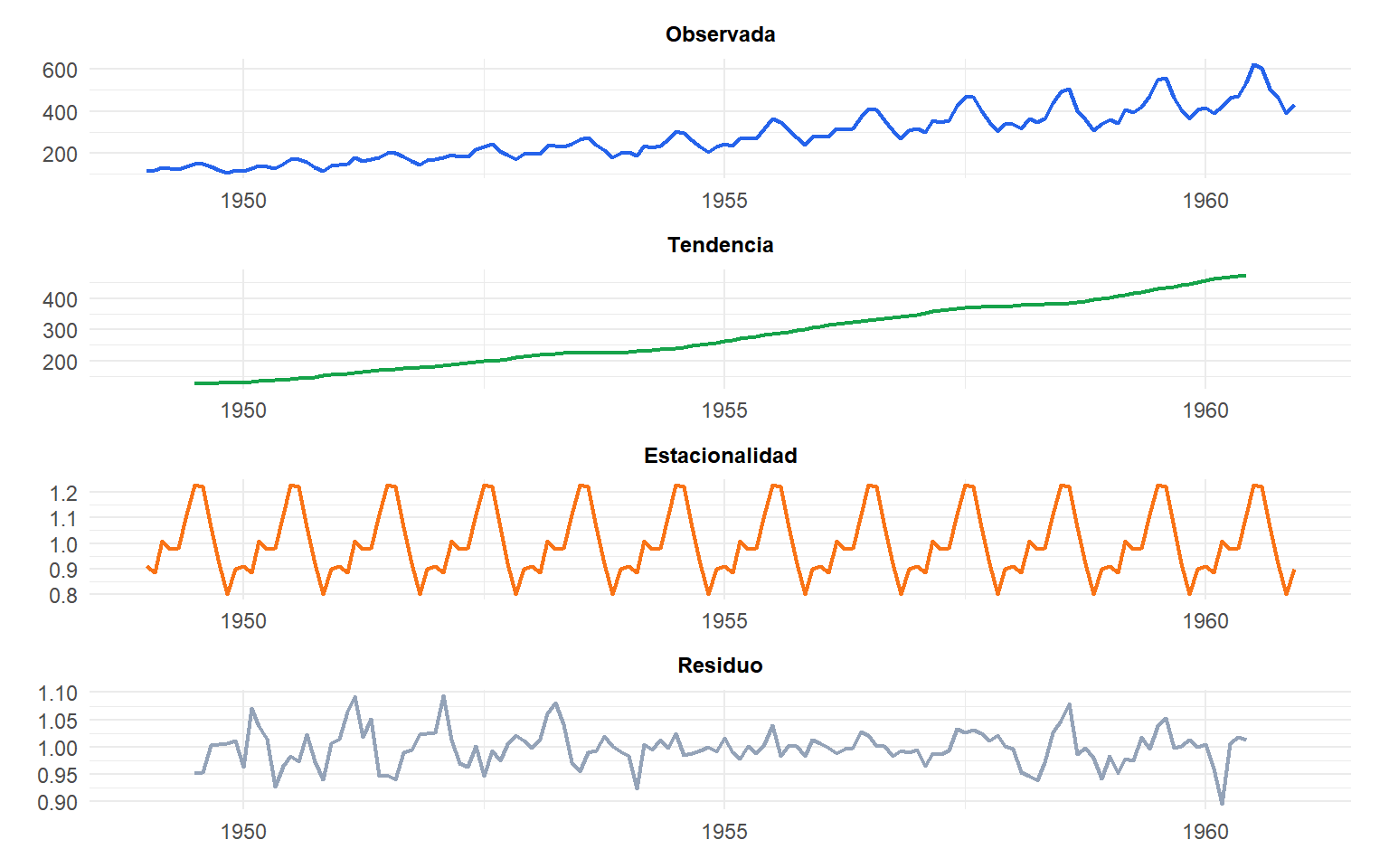
La descomposición multiplicativa separa la serie de pasajeros aéreos en sus tres componentes. La tendencia (verde) muestra un crecimiento sostenido. El componente estacional (naranja) es estable en términos relativos. El residuo (gris) es aproximadamente ruido blanco, lo que confirma que la descomposición ha capturado la estructura principal.
Estacionariedad
Una serie de tiempo es estacionaria si sus propiedades estadísticas no cambian con el tiempo:
\[E[y_t] = \mu \quad \forall t \qquad \text{(media constante)}\] \[\text{Var}(y_t) = \sigma^2 \quad \forall t \qquad \text{(varianza constante)}\] \[\text{Cov}(y_t, y_{t+k}) \text{ depende solo de } k, \text{ no de } t \qquad \text{(autocovarianza constante)}\]
La mayoría de los modelos de series de tiempo (AR, MA, ARMA, ARIMA) requieren o asumen estacionariedad. Una serie con tendencia o varianza creciente es no estacionaria y debe transformarse antes de modelarla.
Transformaciones habituales para lograr estacionariedad:
- Diferenciación: \(\Delta y_t = y_t - y_{t-1}\) elimina una tendencia lineal.
- Transformación logarítmica: \(\log(y_t)\) estabiliza la varianza que crece con el nivel.
- Diferenciación estacional: \(y_t - y_{t-s}\) elimina los patrones estacionales.
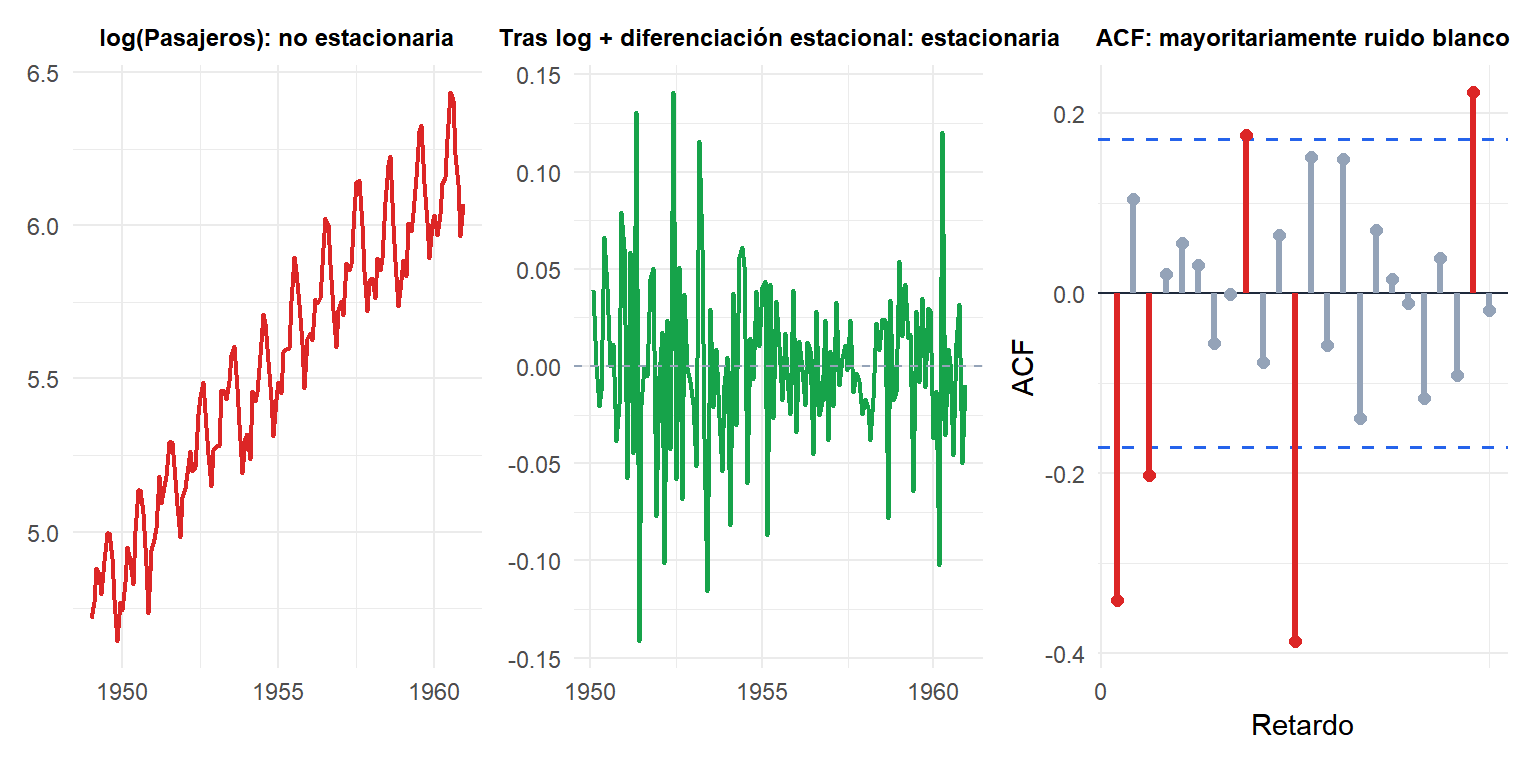
Tras aplicar la transformación logarítmica y la diferenciación estacional, la serie se vuelve estacionaria: media constante en torno a cero, sin tendencia visible y una ACF con pocos picos significativos.
⚠️ Aplicar regresión estándar a series no estacionarias produce resultados espurios
Regresar una serie no estacionaria sobre otra puede arrojar un \(R^2\) elevado y coeficientes significativos aunque las series no guarden ninguna relación. Esto se conoce como regresión espuria, un problema clásico descrito por Granger y Newbold (1974).
Dos series no estacionarias que coincidan en su tendencia parecerán correlacionadas aunque no tengan nada en común. Comprueba siempre la estacionariedad antes de modelar, y diferencia o transforma la serie si es necesario.
Notación y operador de retardo
El operador de retardo \(L\) (o de diferencia hacia atrás \(B\)) es la notación estándar en series de tiempo:
\[Ly_t = y_{t-1}, \qquad L^k y_t = y_{t-k}\]
\[\Delta y_t = y_t - y_{t-1} = (1-L)y_t\]
\[\Delta^d y_t = (1-L)^d y_t \quad \text{(diferenciación de orden $d$)}\]
Esta notación compacta simplifica la escritura de modelos AR, MA, ARIMA y estacionales.
Resumen de modelos de series de tiempo
Los siguientes artículos cubren los principales enfoques de modelización:
| Modelo | Idea clave | Más adecuado para |
|---|---|---|
| AR(\(p\)) | El valor actual depende de \(p\) valores pasados | Series con memoria corta y reversión a la media |
| MA(\(q\)) | El valor actual depende de \(q\) errores pasados | Series con perturbaciones que se disipan |
| ARMA(\(p,q\)) | Combina AR y MA | Series estacionarias |
| ARIMA(\(p,d,q\)) | ARMA tras \(d\) diferenciaciones | Series no estacionarias con tendencia |
| SARIMA | ARIMA con términos estacionales | Series estacionales |
| Suavizado exponencial | Media ponderada de valores pasados | Predicción a corto plazo |
| Holt-Winters | Suavizado exponencial con tendencia y estacionalidad | Series con tendencia y estacionalidad |
| ARIMAX | ARIMA con regresores externos | Series influidas por factores externos |
| Filtro de Kalman | Representación en espacio de estados | Observaciones ruidosas, sistemas dinámicos |
💡 El flujo de trabajo habitual para modelar una serie de tiempo
Un procedimiento estándar:
- Representar gráficamente la serie: identificar tendencia, estacionalidad y valores atípicos.
- Transformar si es necesario: logaritmo para estabilizar la varianza, diferenciación para la tendencia.
- Comprobar la estacionariedad: test ADF o KPSS.
- Examinar la ACF y la PACF: identificar candidatos para los órdenes AR y MA.
- Ajustar modelos candidatos: comparar por AIC y BIC.
- Verificar los residuos: deben ser ruido blanco (test de Ljung-Box, ACF de los residuos).
- Predecir y evaluar: usar datos retenidos o validación cruzada.

