KKT conditions
The Karush-Kuhn-Tucker (KKT) conditions generalize Lagrange multipliers to problems with inequality constraints. They are the fundamental necessary optimality conditions for constrained optimization: virtually every practical optimization algorithm, from the Simplex method to interior point methods to support vector machines, is built around satisfying the KKT conditions.
The general constrained problem
\[\min_{x \in \mathbb{R}^n} f(x) \quad \text{subject to} \quad g_i(x) \leq 0,\; i=1,\ldots,m \quad h_j(x) = 0,\; j=1,\ldots,p\]
The Lagrangian for this problem is:
\[\mathcal{L}(x, \mu, \lambda) = f(x) + \sum_{i=1}^m \mu_i g_i(x) + \sum_{j=1}^p \lambda_j h_j(x)\]
where \(\mu_i \geq 0\) are the multipliers for inequality constraints and \(\lambda_j\) (unrestricted in sign) are the multipliers for equality constraints.
The five KKT conditions
At a local minimum \(x^*\) satisfying a constraint qualification, there exist multipliers \(\mu^* \geq 0\) and \(\lambda^*\) such that:
1. Stationarity: \[\nabla f(x^*) + \sum_{i=1}^m \mu_i^* \nabla g_i(x^*) + \sum_{j=1}^p \lambda_j^* \nabla h_j(x^*) = \mathbf{0}\]
2. Primal feasibility: \[g_i(x^*) \leq 0 \quad \forall i, \qquad h_j(x^*) = 0 \quad \forall j\]
3. Dual feasibility: \[\mu_i^* \geq 0 \quad \forall i\]
4. Complementary slackness: \[\mu_i^* g_i(x^*) = 0 \quad \forall i\]
Each condition has a clear role:
- Stationarity: the gradient of the Lagrangian is zero. Generalizes the Lagrange condition \(\nabla f = -\lambda \nabla g\) to inequalities.
- Primal feasibility: the solution is feasible. All constraints are satisfied.
- Dual feasibility: inequality multipliers are non-negative. This ensures that active inequality constraints push the solution inward, not outward.
- Complementary slackness: for each inequality constraint, either the constraint is active (\(g_i(x^*) = 0\), constraint boundary is tight) or the multiplier is zero (\(\mu_i^* = 0\), constraint is inactive and plays no role). Both cannot be nonzero simultaneously.
Complementary slackness: the key condition
Complementary slackness is the most distinctive KKT condition. It says that an inactive constraint (one where \(g_i(x^*) < 0\): the solution is strictly inside the feasible region) has no effect on the optimum: \(\mu_i^* = 0\) and the constraint drops out of the stationarity condition.
An active constraint (\(g_i(x^*) = 0\): the solution is on the boundary) may have \(\mu_i^* > 0\): the constraint is binding and its gradient appears in the stationarity condition with nonzero weight.
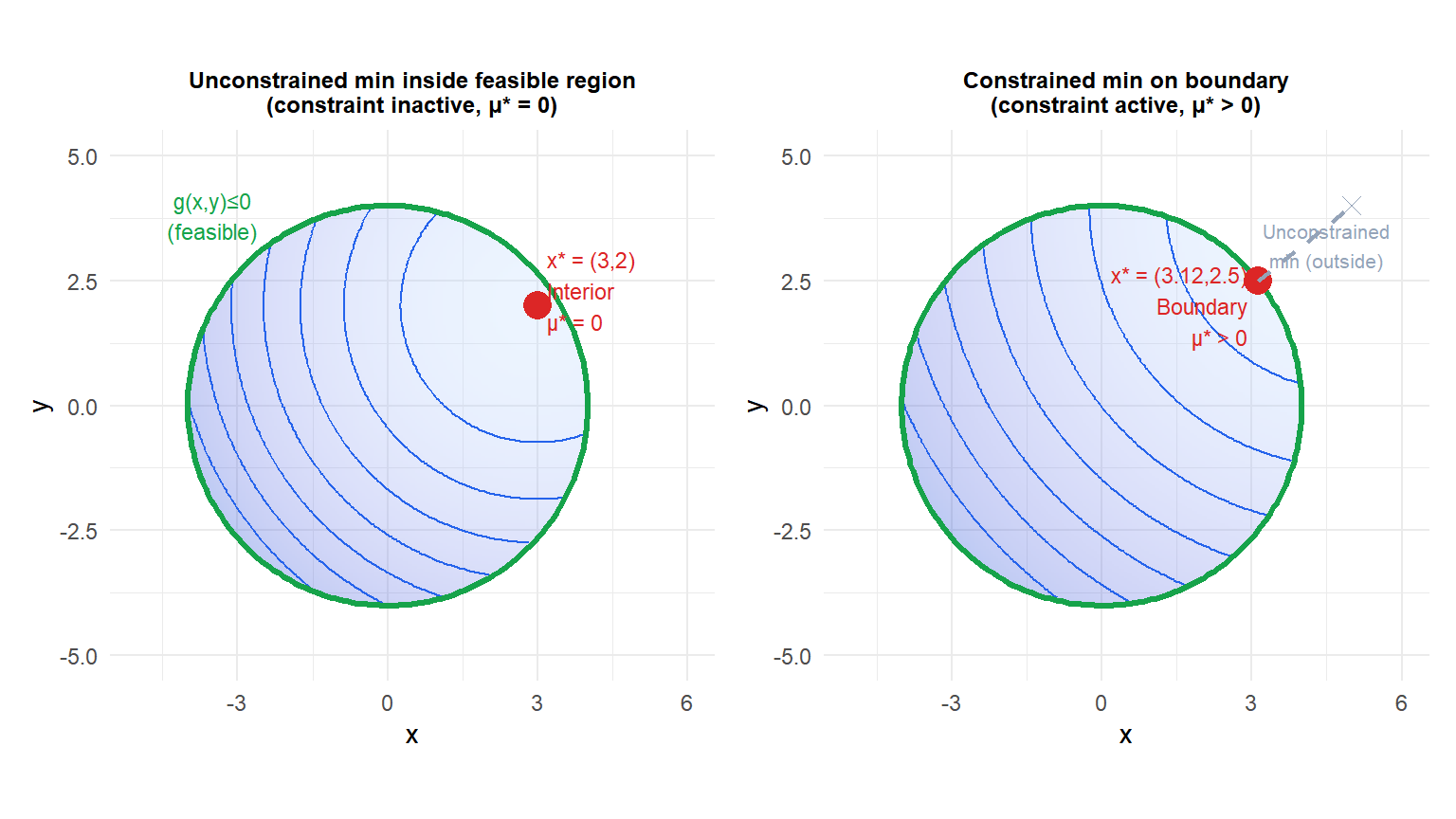
Left: the unconstrained minimum \((3,2)\) lies inside the feasible disk. The constraint is inactive (\(g(x^*)=0^2+2^2-16 = -7 < 0\)), so \(\mu^* = 0\) and the constraint plays no role. Right: the unconstrained minimum \((5,4)\) lies outside the feasible region. The constrained optimum is the projection onto the boundary disk, where the constraint is active (\(g(x^*)=0\)) and \(\mu^* > 0\).
Complete example: inequality-constrained quadratic
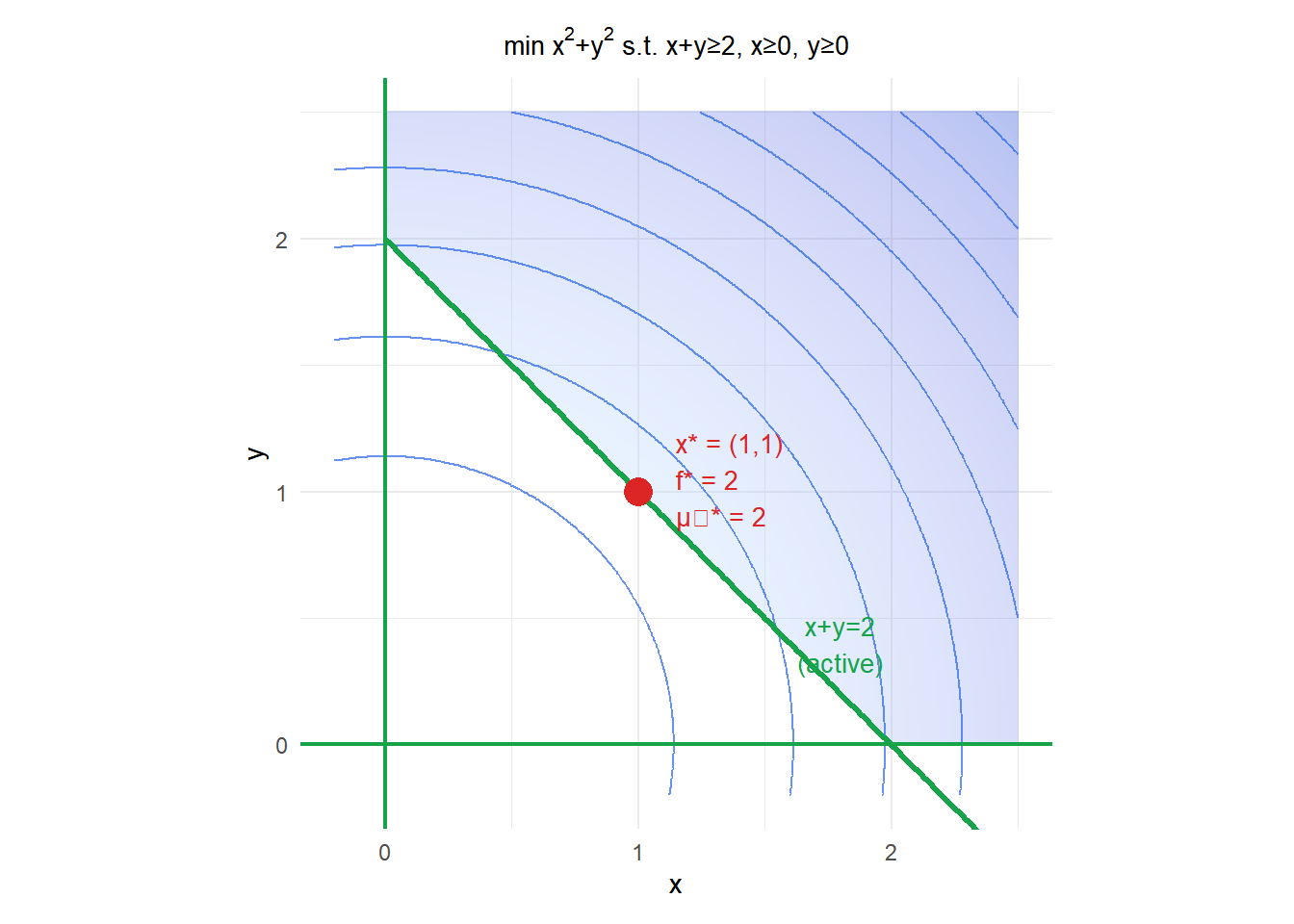
Minimize \(f(x,y) = x^2 + y^2\) subject to \(g_1: x + y \geq 2\) (i.e., \(2 - x - y \leq 0\)) and \(g_2: x \geq 0\), \(g_3: y \geq 0\).
Rewrite in standard form (\(g_i \leq 0\)): \(g_1 = 2-x-y\), \(g_2 = -x\), \(g_3 = -y\).
Lagrangian:
\[\mathcal{L} = x^2 + y^2 + \mu_1(2-x-y) + \mu_2(-x) + \mu_3(-y)\]
Stationarity:
\[2x - \mu_1 - \mu_2 = 0 \implies \mu_1 + \mu_2 = 2x\]
\[2y - \mu_1 - \mu_3 = 0 \implies \mu_1 + \mu_3 = 2y\]
By symmetry (\(f\) and the binding constraint \(x+y=2\) are symmetric), try \(x^* = y^* = 1\).
Check: \(g_1 = 2-1-1=0\) (active), \(g_2 = -1 < 0\) (inactive, so \(\mu_2=0\)), \(g_3 = -1 < 0\) (inactive, so \(\mu_3=0\)).
From stationarity with \(\mu_2=\mu_3=0\): \(\mu_1 = 2x^* = 2\). Check dual feasibility: \(\mu_1=2 > 0\). Check complementary slackness: \(\mu_1 g_1 = 2 \times 0 = 0\), \(\mu_2 g_2 = 0 \times (-1) = 0\), \(\mu_3 g_3 = 0 \times (-1) = 0\). All satisfied.
Optimal solution: \(x^* = y^* = 1\), \(f^* = 2\), \(\mu_1^* = 2\).
The multiplier \(\mu_1^* = 2\) tells us: tightening the constraint from \(x+y \geq 2\) to \(x+y \geq 2+\varepsilon\) increases the optimal value by approximately \(2\varepsilon\).
Sufficiency: when KKT implies global optimality
KKT conditions are always necessary (under a constraint qualification). They are sufficient for global optimality when:
- \(f\) is convex.
- Each \(g_i\) is convex (so \(g_i(x) \leq 0\) defines a convex feasible set).
- Each \(h_j\) is affine (linear).
Under these conditions, any KKT point is a global minimum. This covers the most important practical cases: linear programming, quadratic programming with convex objective, convex portfolio optimization, support vector machines.
For non-convex problems, KKT points may be local minima, local maxima, or saddle points. Finding the global minimum requires additional structure or global search methods.
Application: support vector machines
SVMs find the maximum-margin hyperplane separating two classes. The primal problem is:
\[\min_{w,b} \frac{1}{2}\|w\|^2 \quad \text{s.t.} \quad y_i(w^T x_i + b) \geq 1 \quad \forall i\]
The KKT conditions give the dual problem: only support vectors (points where \(\mu_i > 0\), i.e., the constraint \(y_i(w^T x_i+b) = 1\) is active) appear in the solution. Points far from the margin have \(\mu_i = 0\) by complementary slackness and are irrelevant. This sparsity is a direct consequence of KKT.
⚠️ KKT conditions require constraint qualification
The most common constraint qualification is Linear Independence CQ (LICQ): the gradients of the active constraints at \(x^*\) must be linearly independent. If LICQ fails, KKT multipliers may not exist or may not be unique.
Common situations where CQ can fail:
- Two inequality constraints are tangent to each other at the optimum.
- A constraint has zero gradient at the optimum.
- Too many active constraints (more than \(n\) active constraints in \(\mathbb{R}^n\)).
In practice, CQ failure is rare in well-posed problems. If you suspect it, check that the active constraint gradients are linearly independent at your candidate optimum.
💡 Checking KKT conditions in practice
Given a candidate point \(x^*\), verify KKT manually:
- Check primal feasibility: all \(g_i(x^*) \leq 0\) and \(h_j(x^*) = 0\).
- Compute \(\nabla f(x^*)\) and \(\nabla g_i(x^*)\) for active constraints.
- Solve the linear system for \(\mu_i^*\) from the stationarity condition.
- Check dual feasibility: \(\mu_i^* \geq 0\) for all \(i\).
- Check complementary slackness: \(\mu_i^* g_i(x^*) = 0\) for all \(i\).
In R, numerical KKT verification after solving with nloptr:
library(nloptr)
f <- function(x) x[1]^2 + x[2]^2
grad_f <- function(x) c(2*x[1], 2*x[2])
g_ineq <- function(x) c(2 - x[1] - x[2], -x[1], -x[2])
res <- nloptr(x0=c(0.5, 0.5), eval_f=f, eval_grad_f=grad_f,
eval_g_ineq=g_ineq,
opts=list(algorithm="NLOPT_LD_SLSQP", xtol_rel=1e-8))
res$solution # c(1, 1)
